LURPA > Previous organization > Geo3D team
Definition of multisensor, multiscale digitizing strategies
This topic concerns the definition of adaptive and generic digitizing strategies in a multisensor/multiscale context with controlled uncertainty.
Digitizing strategy in the absence of a priori knowledge
The proposed approach starts with a first digitizing of the object, whose CAD model is unknown. The quality of the result (digitizing noise, accuracy, completeness) is assessed and compared to a predefined threshold, leading either to the acceptance of the point cloud or an automatic redigitizing in order to achieve the expected uncertainty level. The redigitizing is performed thanks to an intelligent sensor trajectory defined as a set of relative admissible configurations sensor/part. An admissible configuration corresponds to a position and an orientation of the sensor relatively to the part (defined by the view angle and de digitizing distance) that ensure the expected quality.
Digitizing strategy based on CAD models
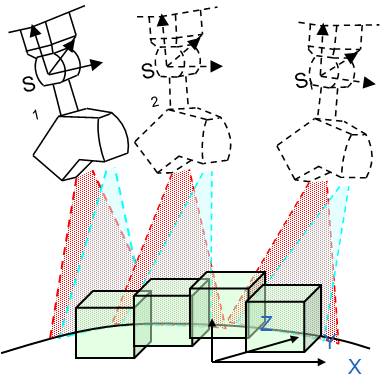
Taking advantage of the knowledge of the part geometry, we propose an original approach to scan path planning that applies for any type of sensors. The approach relies on a simplified representation of the part as a vowel-map. The size of the sensor's field of view (fov) defines the size of the voxel, i.e. the level of approximation of the surface, for which a sensor configuration is defined. FOV. To each voxel, a unique point of view is associated in function of visibility and quality criteria. Whatever the sensor, the method provides a set of admissible points of view to ensure the surface digitizing with a given quality.
| | |
In situ measurement
Équipe de rattachement
Publications
- Publications sur 5 ans (depuis 2008)
- Publications antérieures (jusqu'à 2007)